Mappa esponenziale
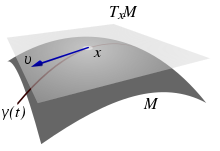


In geometria differenziale, la mappa esponenziale è una funzione che mappa lo spazio tangente in un punto di una varietà riemanniana o pseudo-riemanniana sulla varietà stessa. La mappa esponenziale è utile a rappresentare un intorno di un punto tramite coordinate geodetiche.
Definizione
Sia un punto in una varietà riemanniana o pseudo-riemanniana . La mappa esponenziale è una mappa



definita su un insieme aperto dello spazio tangente in contenente l'origine, nel modo seguente.


Per ogni vettore non nullo dello spazio tangente, esiste un'unica geodetica

tale che e . La geodetica è qui descritta nel suo dominio massimale: i numeri e sono positivi o . Se , si definisce .







Si estende infine la mappa esponenziale all'origine, ponendo . I vettori su cui è definita formano un aperto contenente l'origine.


Proprietà
Geodetiche
La mappa esponenziale mappa ogni retta passante per l'origine sulla geodetica avente come tangente quella retta. Se la geodetica può essere estesa fino ad avere lunghezza infinita in ambo i sensi, la mappa è definita su tutta la retta; altrimenti, la mappa è definita solo sul segmento aperto massimale su cui la geodetica può essere estesa.
Completezza
Il teorema di Hopf-Rinow fornisce varie nozioni equivalenti di completezza per una varietà riemanniana. Tra queste, c'è la possibilità di prolungare indefinitivamente ogni geodetica. Segue quindi che se è completa la mappa esponenziale è definita su tutto lo spazio tangente

per ogni punto di .

Invertibilità locale
La mappa esponenziale è continua e differenziabile, con differenziale invertibile nell'origine. Per il teorema di invertibilità locale, esiste un intorno dell'origine in tale che



è un diffeomorfismo. La mappa esponenziale è cioè un diffeomorfismo locale nell'origine, ed è quindi utile a modellare la varietà localmente vicino a .
Raggio di iniettività
Benché lo sia in un intorno dell'origine, la mappa esponenziale non è però necessariamente globalmente iniettiva: il raggio di iniettività di una varietà riemanniana in è il massimo numero tale che la mappa


ristretta alla palla di raggio centrata in zero è iniettiva. La palla è

ove la norma di è data dal prodotto scalare definito dal tensore metrico.

Esempi
Varietà non completa
Se

è lo spazio euclideo privato dell'origine, e è un qualsiasi punto di , la mappa esponenziale non è mai definita su tutto il piano tangente . Infatti non risulta definita sul vettore , poiché la geodetica uscente da in direzione è definita soltanto fino a che questa non incontra l'origine. L'aperto è quindi tutto lo spazio privato di una semiretta.

Coordinate geodetiche
Le coordinate geodetiche in un intorno di un punto sono definite tramite la mappa esponenziale.
Definizione
Sia un punto di una varietà (pseudo-)riemanniana . Lo spazio tangente è dotato di un prodotto scalare definito positivo, dato dal tensore metrico. Lo spazio è quindi identificabile con lo spazio euclideo : per ottenere questa identificazione è sufficiente scegliere una base ortonormale.


Sia un intorno dell'origine nello spazio tangente su cui la mappa esponenziale è un diffeomorfismo. Questo aperto è identificato con un aperto di . Conseguentemente, l'immagine è identificata con questo aperto. L'identificazione fornisce un sistema di coordinate, detto geodetico o normale.

Proprietà
Le coordinate geodetiche identificano un intorno aperto di con un intorno aperto dello spazio euclideo . Valgono le proprietà seguenti.
Geodetiche
Il punto è identificato con l'origine. Le geodetiche uscenti da sono identificate con le rette uscenti dall'origine.
Tensore metrico
Il tensore metrico in è rappresentato dalla matrice identità. Questo avviene però generalmente solo in : se avviene in tutto l'intorno, la metrica in questo intorno è piatta, cioè senza curvatura.

Più precisamente, il tensore metrico è approssimato dalla metrica Euclidea al primo ordine:

In particolare, si annullano le derivate prime del tensore metrico:

Simboli di Christoffel e derivata covariante
I simboli di Christoffel si annullano in :

La derivata covariante nel punto quindi coincide con la derivata parziale.
Bibliografia
- (EN) Manfredo Perdigao do Carmo, Riemannian Geometry, 1994.
- (EN) Shoshichi Kobayashi, Katsumi Nomizu, Foundations of Differential Geometry, Vol. 1, Wiley-Interscience, 1996 (Nuova edizione), ISBN 0-471-15733-3.
Voci correlate
 Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica
Portale Matematica: accedi alle voci di Wikipedia che trattano di matematica










