Smíšený součin[1] je v matematice operace násobení vektorů v trojrozměrném vektorovém prostoru se skalárním součinem, kterou lze definovat jako skalární součin prvního vektoru s vektorovým součinem druhého a třetího vektoru.
Definice
Mějme aritmetický vektorový prostor s kanonickou bází nad číselným tělesem , pak vektory v daném pořadí tvoří smíšený součin, platí-li:
,
kde pro jsou složky vektorů .
Vlastnosti
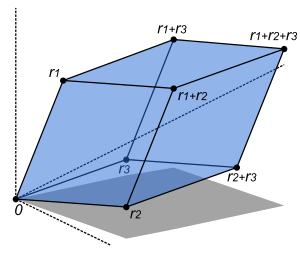
Objem rovnoběžnostěnu je absolutní hodnotou determinantu vektorů , a .
Geometrický význam smíšeného součinu je objem rovnoběžnostěnu jimi určeného.
Při záměně libovolných dvou vektorů ve smíšeném součinu zůstává absolutní hodnota výsledku stejná, výsledek ale změní znaménko, tj. výsledek smíšeného součinu závisí na pořadí vektorů.
Vektorový součin kolineárních vektorů je nulový vektor, tj. smíšený součin je pak roven nule.
Smíšený součin vektorů kladně orientované kanonické báze je roven jedné.
↑BICAN, Ladislav. Linearni algebra a geometrie (upr. vydání). [s.l.]: Academia, 2009. ISBN978-80-200-1707-9.Je zde použita šablona {{Citation}} označená jako k „pouze dočasnému použití“.



![{\displaystyle \mathbf {a} \cdot (\mathbf {b} \times \mathbf {c} )=det[\mathbf {a} ,\mathbf {b} ,\mathbf {c} ]={\begin{vmatrix}a_{1}&b_{1}&c_{1}\\a_{2}&b_{2}&c_{2}\\a_{3}&b_{3}&c_{3}\end{vmatrix}}=a_{1}b_{2}c_{3}-a_{1}b_{3}c_{2}+a_{2}b_{3}c_{1}-a_{2}b_{1}c_{3}+a_{3}b_{1}c_{2}-a_{3}b_{2}c_{1}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/2569ec75ab04e5a51daf71cec4f50ae177277d9c)







![{\displaystyle [\mathbf {a} ,\mathbf {b} ,\mathbf {c} ]=\varepsilon _{ijk}a_{i}b_{j}c_{k}}](https://wikimedia.org/api/rest_v1/media/math/render/svg/84c1bbce26f928b3be339e1a1a11f14ec76462f2)











